Hallo,
http://666kb.com/i/b9ykar8p2ksqnrjmm.jpg
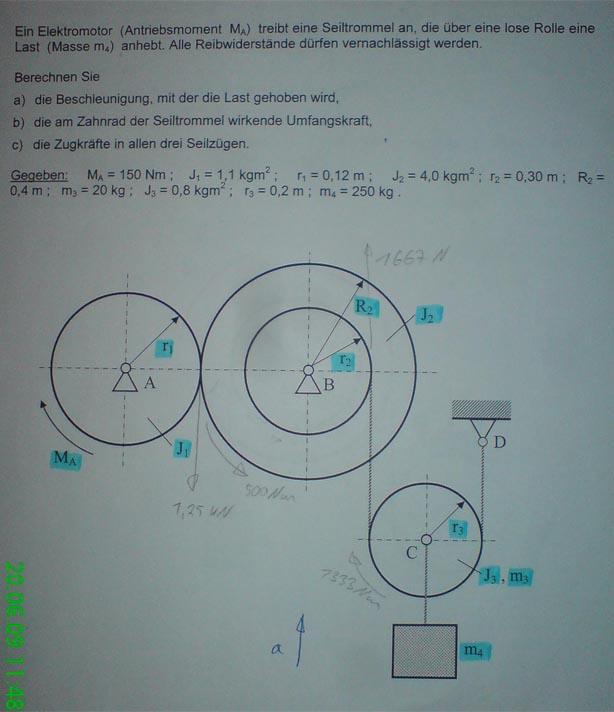
Zuerst einmal eine grundlegende Frage: Ist alpha bei allen
Rollen gleich groß ?
na, stell Dir mal vor, Rolle 1 wäre ein Zwei-Meter-Durchmesser-Kaliber und Rolle 2 nur ein winziges Uhrenrädchen → gleiche alphas?
Nein, nicht die φ’s, ω’s und α’s sind gleich, sondern die s’s, v’s und a’s, nämlich die Umfangswege/-geschwindigkeiten/-beschleunigungen. Daraus folgt dann mit s = φ r bzw. v = ω r bzw. a = α r, dass sich die φ’s, ω’s und α’s zweier miteinander gekoppelter Räder reziprok zum Verhältnis ihrer Radien verhalten.
Hier noch eine mögliche Lösung. Zu den von mir gewählten Formelbuchstaben Q, S, S’ und T für die Seilkräfte siehe diese Skizze:
http://img231.imageshack.us/i/rollenundseile.jpg/
Damit es keine Unsicherheiten in der Behandlung der Kopplung der beiden Rollen 1 und 2 gibt, habe ich sie einfach getrennt und ein Seil (grün) dazwischen eingefügt.
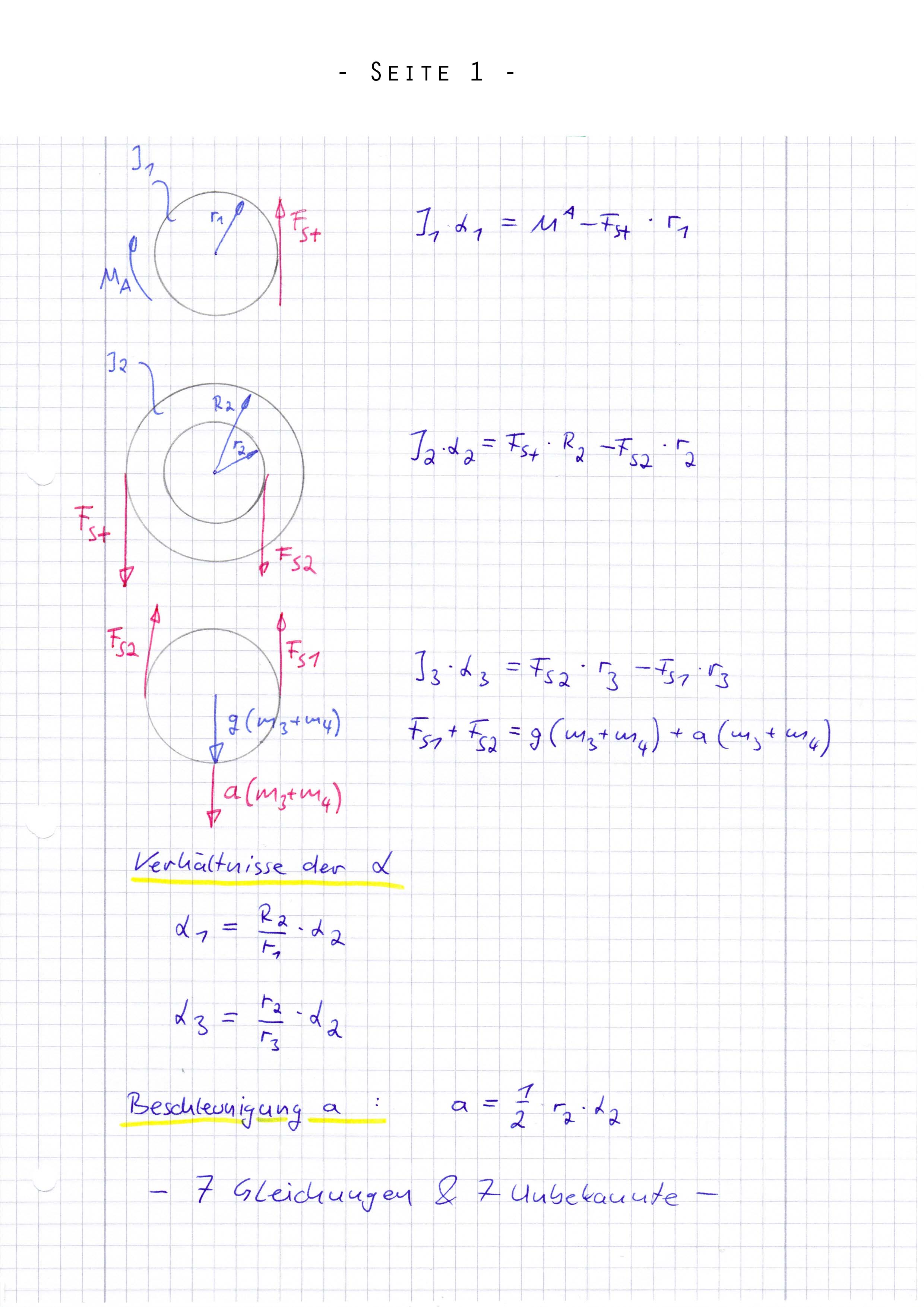
Fünf Bewegungsgleichungen sind aufzustellen… (Obacht mit den Vorzeichen: ich habe alle αs als nach rechts drehend, und a als nach unten gerichtet definiert)
\begin{eqnarray}
M_A - Q r_1 &=& J_1 \alpha_1
\quad\quad\textnormal{(Rolle 1 Rotation)}\nonumber\
S’ r_2 - Q R_2 &=& J_2 \alpha_2
\quad\quad\textnormal{(Rolle 2 Rotation)}\nonumber\
S’ r_3 - S r_3 &=& J_3 \alpha_3
\quad\quad\textnormal{(Rolle 3 Rotation)}\nonumber\
m_3 g + T - S - S’ &=& m_3 a
\quad\quad\textnormal{(Rolle 3 Translation)}\nonumber\
m_4 g - T &=& m_4 a
\quad\quad\textnormal{(Masse m4 Translation)}\nonumber
\end{eqnarray}
…wozu sich noch drei Zwangsbedingungen gesellen:
\begin{eqnarray}
\alpha_1 r_1 + \alpha_2 R_2 &=& 0
\quad\quad\textnormal{(gr"unes Seil)}\nonumber\
\alpha_2 r_2 + 2\alpha_3 r_3 &=& 0
\quad\quad\textnormal{(blaues Seil)}\nonumber\
\alpha_3 r_3 + a &=& 0
\quad\quad\textnormal{(Rolle 3)}\nonumber
\end{eqnarray}
Der Faktor 2 in der vorletzten Gleichung ist korrekt, weil die Rolle 3 eine lose Rolle ist.
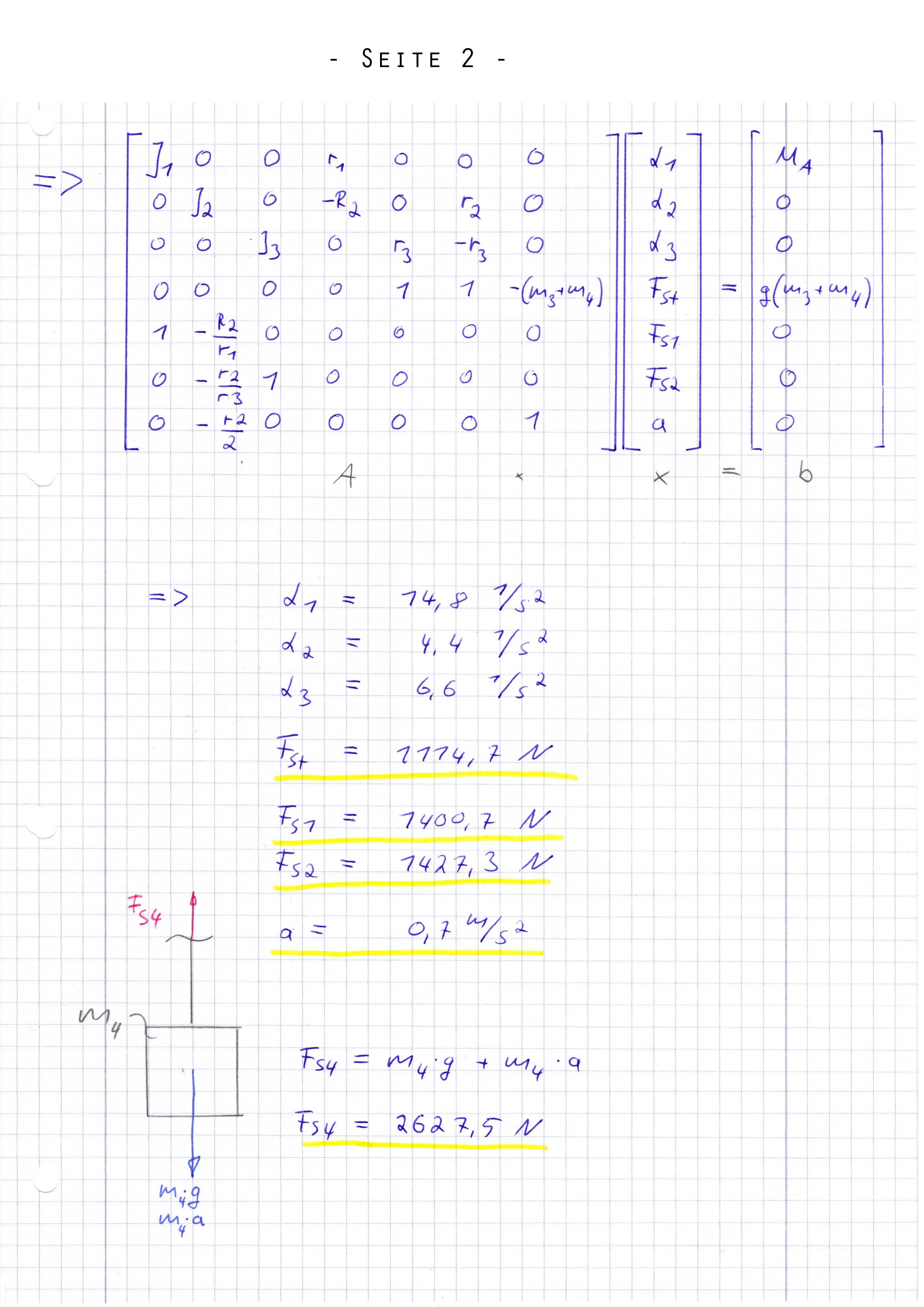
Das ist ein lineares Gleichungssystem mit 8 Gleichungen für die 8 Unbekannten a, α1, α2, α3, Q, S, S’ und T.
Durch scharfes Hinsehen erkennt man, dass sich die beiden untersten Bewegungsgleichungen anbieten, zu einer addiert zu werden:
\begin{eqnarray}
(m_3 + m_4) g - S - S’ &=& (m_3 + m_4) a\nonumber
\end{eqnarray}
Darin kommt zum Ausdruck, dass die an die Rolle 3 angehängte Masse m4 nur die Masse m3 der Rolle 3 vergrößert, aber sonst keine separate Wirkung hat. Man kann diese beiden Massen also zu einer zusammenfassen. Durch die Addition der Gleichungen wird T eliminiert und man hat nur noch ein LGS mit 7 Gleichungen für die 7 Unbekannten a, α1, α2, α3, Q, S und S’.
Jetzt kannst Du das CAS Deines Vertrauens mit diesem LGS füttern oder es von Hand lösen. Maxima hat mir für a diesen Ausdruck präsentiert:
a=-\frac{2,M_A,r_1,r_2,{r_3}^{2},R_2-\mu,g,{r_1}^{2},{r_2}^{2},{r_3}^{2}}{4,{r_3}^{2},J_1,{R_2}^{2}+{r_1}^{2},\left( {r_2}^{2},\left( 2,J_3+{r_3}^{2},\mu\right) + 4,{r_3}^{2},J_2\right)}
mit µ := m3 + m4
Für g = 10 m/s² bekomme ich a = –0.62645 m/s², d. h. die Masse m4 beschleunigt sanft mit 0.62645 m/s² nach oben (wenn Du mit einem anderen g rechnest: aufpassen, a skaliert nicht linear mit g!)
Gruß
Martin
––––––––––––––
MOD (= ich selbst): Kleine Korrektur vorgenommen.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}